
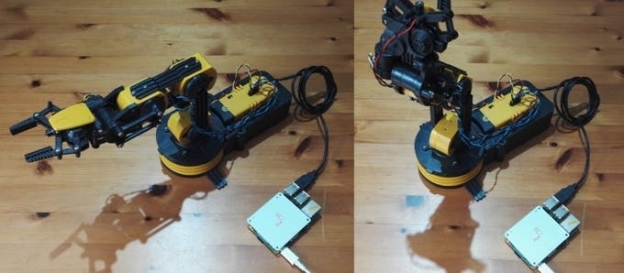
This guide will allow you to control a robotic arm to pick up and move objects without having to touch anything! We will be using a Flick Board combined with a Pi to command a motorised robotic arm. This should work with any Pi and Flick combo if the Flick board is compatible with the Pi, likewise the OS is not limited so any Linux OS that has a Terminal or console will work.
So now to get into setting up the project.
This project requires no soldering or electronic construction. The only mildly difficult part is the build of the Robotic Arm for which there is a guide that comes with the Arm and there are various tips and guides online.
Parts for this project:
Raspberry Pi A+,B+ and above
An SD card with your choice of OS (I am using Raspbian Jessie Full)
Maplin Robotic Arm Buy Here
Flick Board compatible with you Pi
For initial preparation:
Monitor
Keyboard
Mouse
Ethernet cable
Use these diagrams to wire up the kit taking extra care with fitting the Flick Board onto the GPIO pins.

I suggest setting up SSH on your Pi for convenience by running:
sudo raspi-config
Choose interfacing options then SSH and enable SSH Server. Next we need to go through the basic updates and installations:
sudo apt-get update
sudo apt-get install git
sudo apt-get install subversion
Run each of those and let them install.
Run each of those and let them install. Then we need to get the Flick Board software via:
curl -sSL https://pisupp.ly/flickcode | sudo bash
And to finish the installing section we need the various programs and software which allow the Pi to talk to the Arm. I would suggest, if possible, copy and pasting each of block of code rather than typing out each line separately.
Install PyUsb:
cd
mkdir pyusb
cd pyusb
git clone https://github.com/walac/pyusb.git .
sudo python setup.py install
cd
sudo rm -r pyusb/
cd
This will install a library that allows the Pi to communicate to the Arm via USB.
Install RobotArmControl program:
cd
mkdir robotarmcontrol
cd robotarmcontrol
svn co http://projects.mattdyson.org/projects/robotarm/armcontrol .
Running this line should make the Arm test every motor and then return to its starting position.
sudo python testRobotArm.py
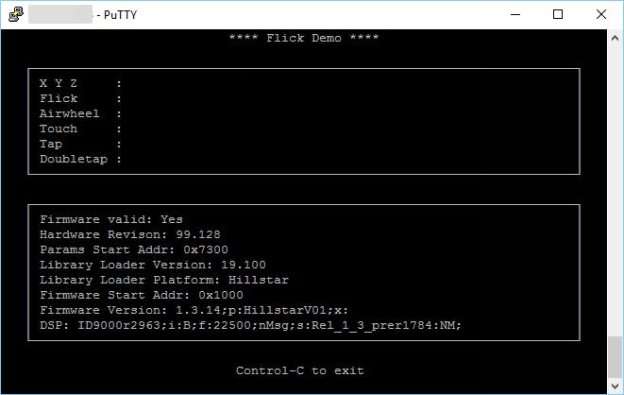
Now to test the Flick Board from the demo program:
flick-demo
When this program is running you should be able to see inputs and values as you move your hand over the Flick.
Now the program which allows control of the Arm:
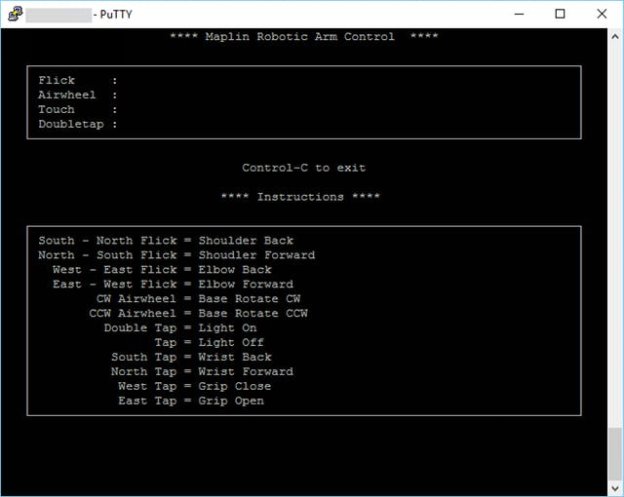
flick-armcontrol